

Læk
FTC 2020 - 2021
2021's second robot, Laek, was built to compete in the Ultimate Goal challenge presented by Qualcomm. This robot was designed, built, and programmed within the 3-week time frame between the league tournament and regional tournament. Laek is the product of over 250 hours of work. On this page, we have outlined the evolution of our drivetrain, collector, shooter, camera holder, and sensor holder.
Drivetrain and Collector
Laek is an adaptation of a previous year’s drivetrain design. As this document was modeled parametrically, the team was able to adjust the sizing of the drivetrain to fit the needs of the team to allocate more design time and resources to other systems within the robot. We collaborated with FTC 14496 Roboctopi to manufacture our drivetrain out of Delrin plates.
The team understood that the collector needed to integrate well with the rest of the robot. We valued the same-side collection and shooting of the robot to reduce the amount of turning required in TeleOp. We designed the collector to fit within the manufacturing requirements, in this case, the bed size of a PRUSA Mark 3 3D printer.

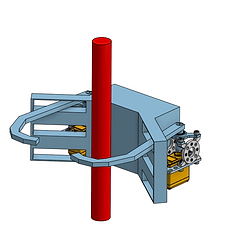
Shooter and Magazine
The team understood the importance of a same size collector and shooter. We iterate through multiple designs to integrate the magazine and the shooter together. As these designs were conceptualized in CAD we determined that these designs were too bulky and had to pivot. We transitioned to a design with rings falling into an actuated magazine that had the adjustment of variable height titling. This left options open for the team to have shooter that tilts. However we were unable integrate this functionality within the time constraints.
Wobble Goal
Our Wobble Goal Collector went through four iterations. Throughout these iterations, the team mainly focused on creating a design that could pick up the Wobble Goal with little precision when targeting it. As we went through multiple designs, we explored the advantages and disadvantages of each one by creating sketches, modeling in CAD, and actually fabricating the mechanism. Our final Wobble Goal Collector (Version 4) features a much larger claw with grip to allow for more room for error when grabbing the Wobble Goal.

Version 1

Version 2
Version 3

Version 4
Sensors
This year we featured 8 distance sensors on the corner of the robot, encoders for the shooter, and three odometry pods.